Genom3tutorialdemo-genom3 » History » Revision 13
« Previous |
Revision 13/22
(diff)
| Next »
Aurélie Clodic, 2014-07-01 10:27
add dataflow information
Genom3tutorialdemo-genom3¶
- Table of contents
- Genom3tutorialdemo-genom3
This section will illustrate genom3 concepts through a concrete example.
The demo compoment will control a virtual mobile that can move in a 1D world. Some of the services the module offers are:- read and set the current speed at any moment
- move the mobile to a given position
- move the mobile of a given distance (from its current position)
- monitor when the mobile passes a given position
- stop the motion
Moreover, the demo component export a port with the current state of the mobile (position and speed).
To implement this, we first create a directory named demo-genom3.
mkdir demo-genom3 cd demo-genom3
The component description file: .gen file¶
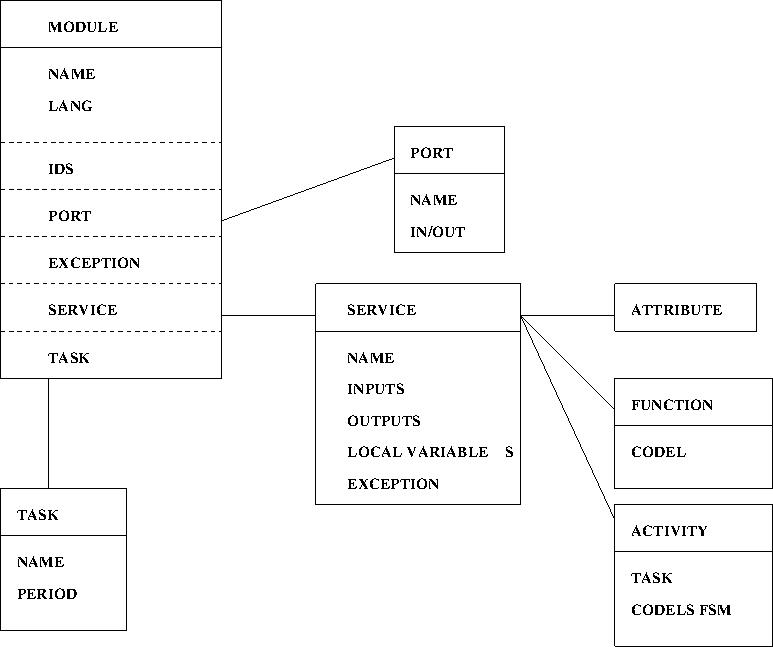
We will describe the .gen description file. It is made up of several parts, each of them being identified with a keywordcomponentidsportexceptiontaskattributefunctionactivity
This .gen reflects the fact that a component need to define an interface made of a set of services and data ports. A component must provide a service invocation facility as well as unidirectional (input and output) data ports. It must be able to send and receive events. It has to define an internal data structure, named the ids, that is used by codels to store global and permanent objects.
Each codel has access to the ids objects and use them to communicate with other codels within the component.
Finally, a component has to define one or more execution tasks that represent the execution context (e.g. thread) in which services are run. Those tasks may be periodic or aperiodic.
The easiest way is to see how all of this is defined is to start from an existing file, so you can download ".gen" file and ".idl" file. We will now explain step by step each part of these files.
Data structure definition¶
A component description always start with the definition of the data types used in the interface. Types are typically defined in separate files and #included in the description, so that the definitions can be shared amongst other components. The syntax used is the subset of the IDL language (part of the OMG CORBA [5] specication) related to data type definitions. Using IDL guarantees the programming language independance and offers a standardized approach. Although IDL is part of CORBA, it should be clear that components are not tied anyhow to CORBA.
#include "demoStruct.idl"
The #include "demoStruct.idl" statement works as a header file in C and includes idl data structure. This file contains all the necessary declarations for the definition of the internal database. These structures are then used in the .gen file. In this example, the file "demoStruct.idl" contains the definition of the position and the speed. This file is preferably located in the same directory as .gen file, since it contributes to the definition of the component interface.
#ifndef IDL_DEMO_STRUCT
#define IDL_DEMO_STRUCT
module demo {
const unsigned long task_period = 400;
const double millisecond = 0.001;
struct state {
double position; /* current position (m) */
double speed; /* current speed (m/s) */
};
enum speed {
SLOW,
FAST
};
};
#endif
component¶
The component declaration describes the instance of the GenoM3 component. It is defined by a unique name (an identifier) that also defines an IDL scope for any embedded types. See the component declaration documentation for details.
component demo {
version "1.1";
email "openrobots@laas.fr";
lang "c";
require "genom3 >= 2.99.20";
- version : The component version number, as a string
- lang : The programming language of the codels interface
- email : A string containing the e-mail address of the author of the component.
- requires : A list of dependencies of the component. It indicates an external dependency on a software package that is required. It assumes that the package is using the pkg-config utility. Each string should contain a package name in pkg-config format.
NB: component declaration is not over, the final } is left for the end .gen file.
ids¶
ids stands for internal data structure, it is used by codels to store global and permanent objects.
Each codel has access to the ids objects and use them to communicate with other codels within the component.
For our example, we considerto store the state, the speed reference and the position of the mobile:
ids {
demo::state state; /* Current state */
demo::speed speedRef; /* Speed reference */
double posRef;
};
demo::state and demo::speed are types defined in the demoStruct.idl file (see above).
port¶
A component define input and output data ports, used to implement data flow connections in parallel to services.
Ports implement the data flow between components as a publish/subscribe model. Ports have a name and a type and can be either out (for publishing data) or in (for subscribing to a sibling out port). Data ports Data ports are defined via the in or out keyword, followed by an IDL type and the name of the port e.g.:
port in data<type> name; port out data<type> name;
In our example, we choose to export the state of the mobile to let this information accessible for example to another port from another component:
/* ---- Port declaration ---- */ port out demo::state Mobile;
exception¶
It is possible to...
/* ---- exception declaration ---- */
exception TOO_FAR_AWAY {double overshoot;};
exception INVALID_SPEED;
execution task¶
Tasks define an execution context suitable for running activities. A task may define a state machine and associated codels.
The state machine starts in the start state when the task is created during component initialization.
Task description follows this scheme:
task name {
period: 100ms;
priority: 200;
stack: 20k;
codel start: tstart(in ::ids) yield main;
codel main: tmain(in d, out s)
yield main, stop;
codel stop: tstop() yield ether;
};
Tasks can define the following properties:
periodThe granularity of the codel scheduler. Periodic task will sequence the codels they manage at that frequency.delayThe delay from the beginning of each period after which codels are run. This can be used to delay two tasks running at the same period in the same component.priorityCan be used to prioritize different tasks whithin the same component.scheduling real-timeThis indicates that the task requires real-time scheduling. This may not be supported by all templates.stackDefines the required stack size for this task. The stack size should be big enough to run all codels that the task manages.
In our example, we choose to get the task_period from the idl file i.e. demo::task_period parameter:
/* ---- Execution task declaration ---- */
task motion {
period demo::task_period ms;
priority 100;
stack 4000;
codel <start> InitDemoSDI(out ::ids, port out Mobile) yield ether;
};
services declarations¶
A service is an interface for running codels. It can be invoked via a request on the component service port. A service has optional input and output data and a list of failure reports. Input data is stored in the IDS (and output read from there), so that codels can access it. A service might be incompatible with other services of the same component or can be started multiple time, provided it is compatible with itself. It always interrupts other incompatible services when starting. A service invocation triggers an activity that manages codel execution. An activity is described by a Petri net in which places correspond to codels execution and transitions are events generated either externally or implicitely by the return value of codels.
Service description follows this scheme:
service name(inout s) {
doc "Service description";
task taskname;
validate svalidate();
throws ERROR_1, ERROR_2, ...;
interrupts name;
codel <start> sstart() yield step1;
codel <step1> sstep1() yield step1, step2;
codel <step2> sstep2() yield ether;
codel <stop> sstop() yield ether;
};
where:
namecorresponds to the name of the servicescorresponds to the parameter of the service. Parameter could be in/inout/out depending of its type. It is possible to have several parameters.taskcorresponds to the task that handle the servicevalidatecorresponds to a function that would be called once at the beginning of the service execution and that aims to check service parameter(s) consistencythrowscorresponds to the list of failure report(s)interruptscorresponds to the service(s) that would be automatically interrupted when the this service is called
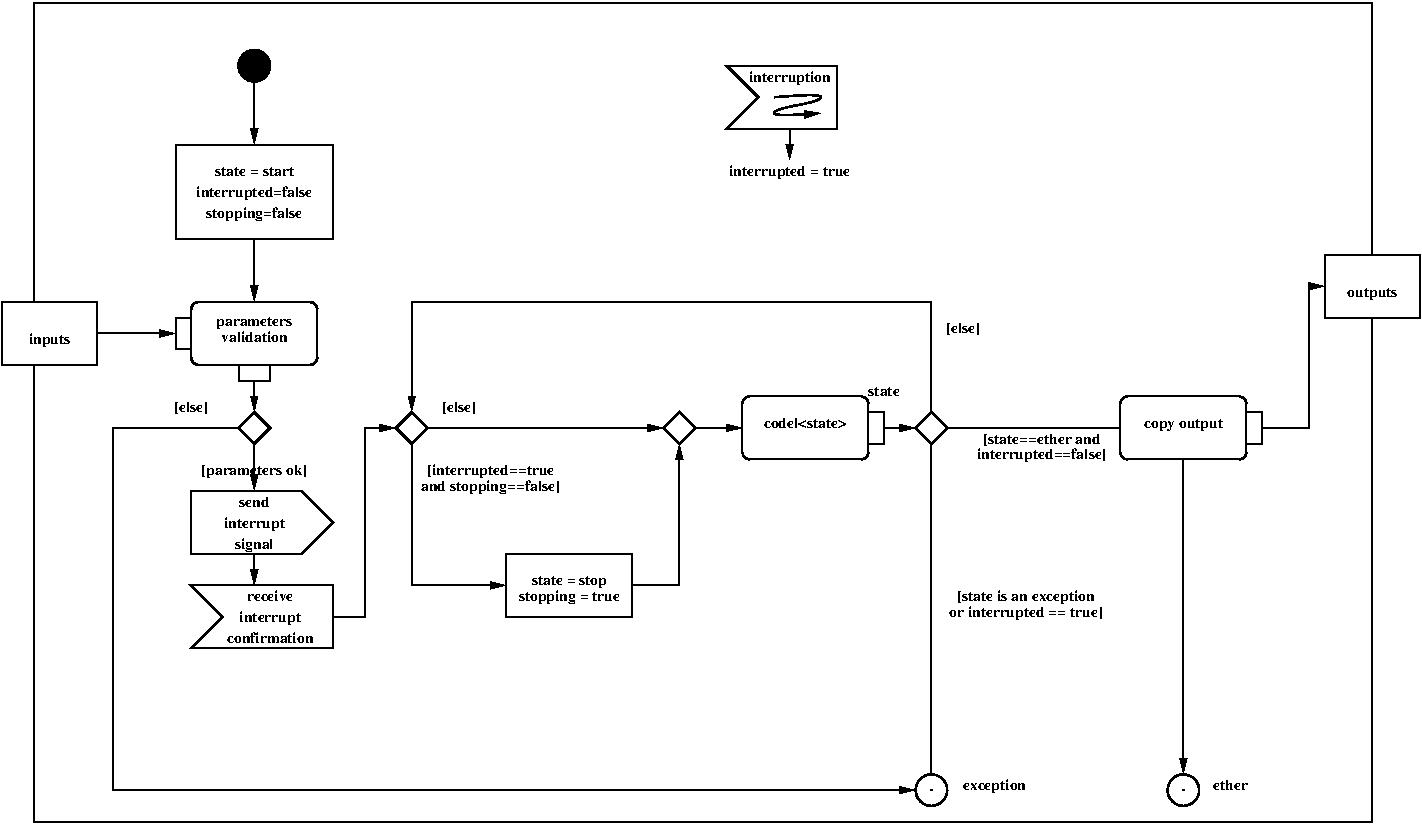
When an activity starts, the start event is generated and the corresponding codel executed. Similarly, the activity is interrupted whenever the stop event is generated.
Asynchronous events trigger the execution of the corresponding codel (if any). A special sleep transition is defined so that an activity can be put in a sleeping state, waiting for external events or a stop to trigger a new transition. The activity stops when all active places in the Petri net have returned the special ether event. If the execution task of a service is periodic, transitions are executed at each period. They are otherwise executed as soon as all the codels corresponding to active places have returned. The codel execution order is undefined.
It should be noticed that no direct remote procedure call (RPC) for service invocation between components is allowed. RPC should be performed by external applications that take care of setting up the architecture of components. While this differs from traditional approaches, this guarantees that components can be controlled and will not interfere with the system. This also grants an increased reusability since no component explicitely depends on a particular set of services implemented by other components.
3 types of services are available through GenoM3: attribute, function and activity. Each follow the same service pattern.
attribute¶
attribute service type should be used...
attribute SetSpeed(in speedRef = demo::SLOW :"Mobile speed")
{
doc "To change speed";
validate controlSpeed (local in speedRef);
throw INVALID_SPEED;
};
attribute GetSpeed(out speedRef = :"Mobile speed")
{
doc "To get current speed value";
};
function¶
function Stop()
{
doc "Stops motion and interrupts all motion requests";
interrupts MoveDistance, GotoPosition;
};
activity¶
activity MoveDistance(in double distRef = 0 :"Distance in m")
{
doc "Move of the given distance";
validate controlDistance(in distRef, in state.position);
codel <start> mdStartEngine(in distRef, in state.position,
out posRef) yield exec, ether;
codel <exec> mdGotoPosition(in speedRef, in posRef, inout state,
port out Mobile) yield exec, end;
codel <end, stop> mdStopEngine() yield ether;
interrupts MoveDistance, GotoPosition;
task motion;
throw TOO_FAR_AWAY;
};
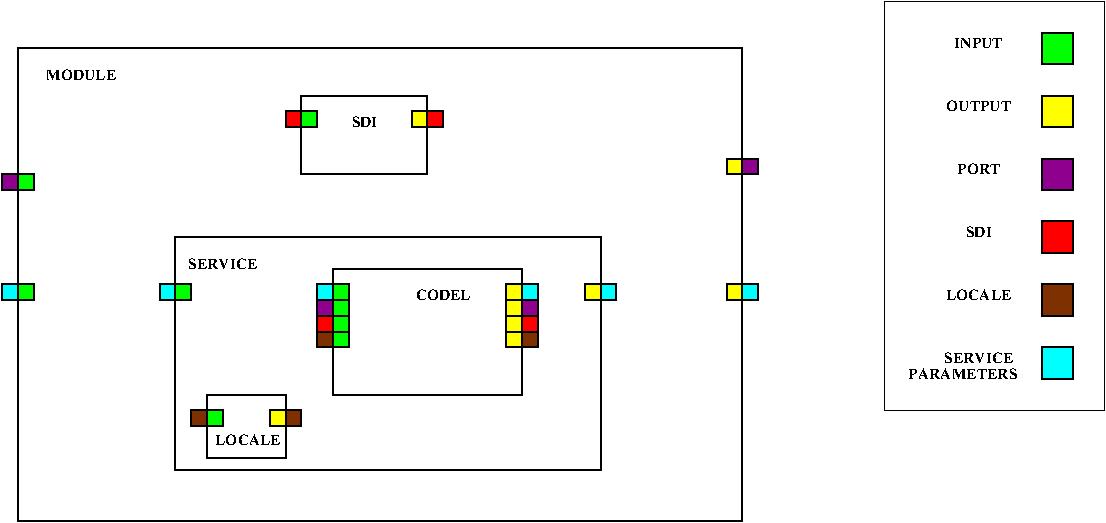
Data flow¶
Module generation¶
You can copy demo.gen and demoStruct.idl in your demo-genom3 repository.
genom3 skeleton demo.genFrom now on, the component is ready to be compiled and run. You can have a look at the result of the command. GenoM3 created two new directories (
codels/ and autoconf/) and several new files.
- Algorithms (or a part of them) are grouped in the directory
codels/. The files in that directory give you template to start from, and also let GenoM3 produce a module even if you still do not have written a single line of code. - The
Makefile.amandconfigure.acfiles are also under your control. These are the main files which are used for the compilation of the module.
Codels writing¶
In the codels directory, you would find these two files: demo_codels.c and demo_motion_codels.c.
demo_codels.c¶
Updated by Aurélie Clodic over 10 years ago · 22 revisions